








Send Message
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.

In order to complete the ocean-going space measurement and control and communication business, large precision tracking antennas should be installed on the measurement and control and communication measurement ship. Because the hull is affected by ocean waves, random sway (rolling, pitching, yaw) will cause the antenna's boresight to sway, which can easily cause the tracking performance of the narrow-beam antenna to deteriorate and even cause the target to be lost. In order to accurately track the target and reduce the disturbance caused by the movement of the carrier to the antenna tracking, it is necessary to establish an anti-disturbance stabilization system to make the antenna output visual axis isolate the hull disturbance and stabilize it in the inertial space coordinate system. Requirements to ensure the tracking ability and tracking performance of the system.
In order to effectively realize the anti-disturbance function, the traditional scheme needs to use multi-mode compensation at the same time, use at least 6 rate gyros to detect the three-dimensional disturbance information of the hull and the active rotation information of the antenna, according to the three axes of the antenna (azimuth axis, pitch axis, crosscut Shaft) structure, combined with feed-forward open-loop compensation and feedback closed-loop compensation, to achieve isolation from disturbances. The scheme design is complicated, the gyroscope usage is large and the redundancy is not enough.
1 The effect of the three-dimensional disturbance of the hull on the visual axis of the three-axis antenna
The three-axis antenna system (transverse axis C, azimuth axis A, and pitch axis E) is based on the traditional AE-type base, and the vertical axis is superimposed on the pitch axis, and the transverse axis is perpendicular to the electrical axis. . When the pitch angle E = 0 °, the transverse axis coincides with the azimuth axis; when the pitch angle E = 90 °, the transverse axis is perpendicular to the azimuth axis.
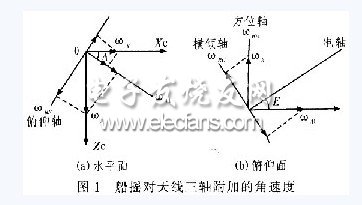
When the hull represents the disturbance with the angular velocity vector ωz = (ωpωyωh). Among them: ωy is the ship's roll speed, ωp is the ship's pitch speed, and ωh is the ship's heading speed. The changes of the ship's roll parameters are converted to the velocity components of the roll axis, azimuth axis, and pitch axis, as shown in Figure 1. Let ωRE be the additional azimuth speed of the ship roll, ωRC be the additional roll speed of the ship roll, ωRE be the additional pitch speed of the ship roll Deck coordinate system: OXc is the bow line of the ship, the bow is positive, and OYc is the vertical deck plane, upward If it is positive, OZc is determined by the right-hand rule.
Can be obtained from Figure l (a):

When A = 0 °, the pitch speed is ωp = 0, and only the roll amount ωy; when A = 90 °, the roll speed is ωy = 0, and only the pitch amount ωp. Under the combined action of active antenna drive and carrier disturbance, the total rotation speed of each axis of the antenna is:

Equations (2) to (4) are the reflection of the three-dimensional disturbance of the hull on the three axes of the antenna. The servo control system can use open-loop compensation to eliminate its impact on the antenna tracking. Equations (5) to (7) are the total rotation information of the three axes of the antenna in the inertial space. The servo control system can use a closed loop method to eliminate its influence on the antenna tracking. Therefore, it is the core of the anti-disturbance design of the servo system to try to measure the information correctly and adopt the appropriate control mode to suppress the disturbance so that the antenna can track the target quickly and stably.
2 Anti-disturbance design
Ship sway disturbance is introduced into the servo system as an interference signal. The principle of stable control is to detect such interference and reduce or eliminate its influence by adopting closed-loop or open-loop mode. Disturbance isolation methods include: rate gyro feedforward compensation, rate gyro feedback control, compound control and other methods. Because the gyro closed-loop control is essentially an error adjustment method. The gyroscope measures the comprehensive disturbance information, and cannot distinguish the disturbance information component from the follow-up information component. Therefore, while suppressing the disturbance information, the gyro loop also dynamically suppresses the active movement of the antenna, which reduces the response speed of the system and deteriorates the stability of the system. Relatively speaking, feed-forward compensation is an open-loop adjustment method. The measured disturbance information is added to the input of the speed loop to make the antenna shaft rotate at the opposite speed to the ship's roll to compensate. At the same time, since the structure and parameters of the tracking loop are not changed, the bandwidth of the system is not affected and the stability of the loop is good.
2.1 Compensation principle
The feedforward compensation method is to rotate the antenna in the opposite direction to the disturbance to overcome the influence of the disturbance. According to the reflection of the three-dimensional disturbance on the three axes of the antenna, the installation position of the gyro is reasonably designed to induce the movement speed of the three axes of the antenna relative to the inertial space caused by the ship's roll. The input end of the ring makes the rotation of the antenna axis opposite to the direction of the ship's yaw and the same amount of speed play a restraining role.

June 28, 2024
Wyślij je do tym dostawcy
June 28, 2024
Skontaktować

Send Inquiry
CATEGORIES
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.
Fill in more information so that we can get in touch with you faster
Privacy statement: Your privacy is very important to Us. Our company promises not to disclose your personal information to any external company with out your explicit permission.